So far, we have looked at the web guide mechanism, actuator and sensor. The remaining component of a web guiding system is the web guide controller.
The controller is the central processor that takes the sensor input and computes the proper corrective action for moving the web guide.
Every guiding system requires a controllers. It is, after all, the processor of the input and output signals that come from the sensor and go to the actuator. Initially, simple controllers had knobs, buttons and lights to help calibrate the sensor and actuator. Initially, controllers had operator interfaces with buttons and knobs for selecting menus and calibrating controllers and sensors. However, these were difficult to navigate and required manuals for instructions on using these options. Most handled analog electrical or pneumatic analog signals. Today, controllers have evolved to include a human-machine interface, most likely an operator interface with screen input and feedback, to allow operators to set parameters, select options and view current status of the system..

Terminology for Web Guide Controller
As with all elements in the converting industry, there are certain terms that you run across when dealing with controllers. Gain is the most commonly used term and it deals with how quickly or what kind of dynamic response is needed. Operating voltage and power consumption refer to the power requirement of the controller. As mentioned before in this post, Human Machine Interface (HMI) or Operator Interface (OI) indicate the availability of operator handling of the controller. Today, user friendly screens are a great step forward in creating systems that are simple and easy to operate. The type of driver/drivers the controller has depends on the type of actuator, is it for a stepper motor or a servo motor. Controllers might have one sensor input port or several. In some cases, connectivity such as Ethernet or Profinet is desired and/or remote control capability.
Fixed Gain Proportional Controller
Most web guide control systems have structure where you have a fixed gain proportional control. The proportional control is probably all you need in a controller for a web guiding system because the integration operation is built into the system. Usually you have a motor, a current loop, a velocity loop with a tachometer, a guide structure with its own transmission ratio, and the web dynamics which are unknown. The web dynamics refers to how the web moves if the web guide moves a certain amount. This depends on transport conditions, stiffness of the web, tension, and other web characteristics. Finally, you have the sensor that measures the edge position and transmits the information to a position controller that drives all the loops. This is a fairly simple architecture for web guide controllers.
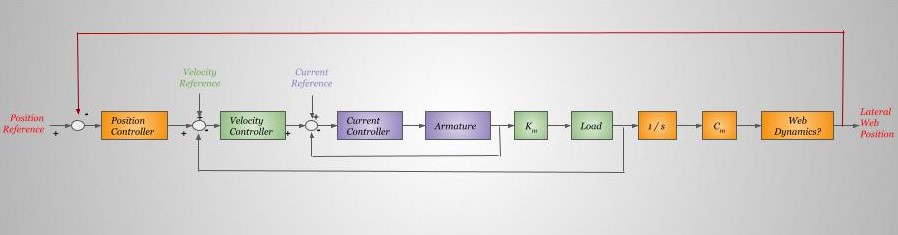
Web guide proportional controllers are fixed gain and most often are detuned for the conditions. To get the optimal performance you would have to tune the controller because of the unknown web dynamics. Most often DC motors, DC servo motors, and DC stepper motors are used with this controller structure.
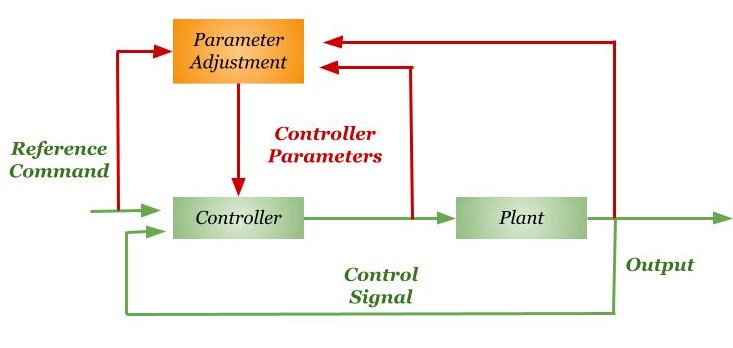
Model Reference Adaptive Control
There other advanced control technologies such as adaptive control where the controller adapts or learns on the fly. Tuning may not be required. Learning on the fly means it adapts to sensor gain changes or the dynamics of the web
Advanced Stepper Control Structure
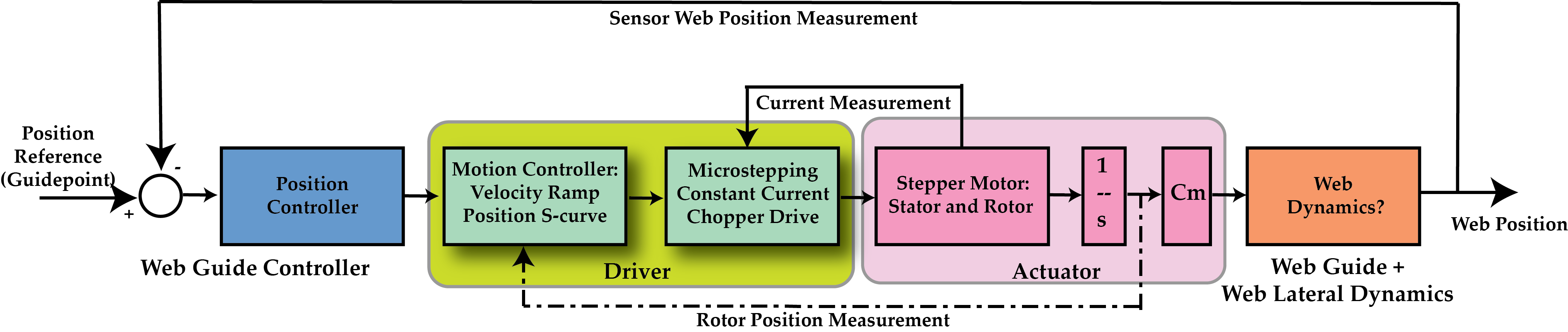
In our case, we have a fairly similar structure as the fixed gain proportional controller. However, it has some motion control aspects built into it, in term of s-curving the position, and having trajectories for velocity. We can increase the stability of the controller and provide fairly aggressive output performance. Again, it is pretty similar to the fixed gain proportional control with a current loop, a position loop if you have an encoder, the position of the actuator, and the web position which would include the web dynamics.
Open Loop versus Closed Loop Step Response
You've probably heard of non-feedback and feedback control systems. This is another form of identifying open loop and closed loop systems. Open loop systems do not measure the output signal and is not fed back to the controller for comparison with a set point in the system. Closed loop systems have the ability to self correct as it's out put is affected by the signal input an the correction calculated by the control. We have done tests in our lab with a web guide system using an open loop system. Even though web guide system slowly attempts to correct the web location, it is very dependent on the web velocity and is not very responsive. The same test with a web guide with a closed loop system is much more effective and achieves a stable output fairly quickly.
Characteristics of a good controller for a web guiding system
When discussing what is desirable on a controller for a web guiding systems we have a few main features. It should a good dynamic response, that is the ability to attenuate disturbances on the web guide. It should be easy to tune, or better yet, require no tuning. Obviously, it should be stable and should have fast processing power in order to process multiple sensors. With the new converting machine designs, manufacturers and end users alike seek industrial Ethernet connectivity for advanced functionalities. Another desirable feature of modern controllers is an intuitive operator interface. In general, converting operations are moving toward user friendly systems that allow for fast navigation through menus and easy to understand icons. Finally, as greater advances are achieve in automation, OEMs are adopting more AI into their systems as the converting industry works to include industry 4.0.
Our next blog on fundamentals of web guiding will address Guiding Performance.
We hope that this series is of benefit to you and your operation and keep following our posts.
If you have any questions or would like additional information on our technology, products or just general web guiding contact us!
