So far we have discussed the different types of web guiding systems for converting applications. You now should know the different types of web guiding systems, and their design and installation recommendations. Also, you should have an idea of why web guiding is needed and where they should be installed in converting operations. In this blog post we will address a component of a web guiding system, the web guide actuators.
Web guides have four main components: actuator, web guide mechanism, controller, and sensor. All four work together to place the web in the desired location. The actual movement of the web guide mechanism is performed by the actuator.
Actuators provide the driving force to move the guide structure which in turn positions the web
Terminology used for Actuators
When speaking about actuators you will find certain terms that are part of the selection or sizing of actuators:
- Thrust and power - is the actuator capable of moving the total load, considering the friction between bearings and raceways supporting the side-lay or carriage, and through what distance?
- Speed and acceleration - how fast can the actuator move the load, stop it, and change direction?
- Stroke length - how far does the actuator shaft extend from its completely retracted position?
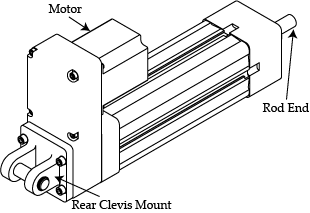
- Mounting/Coupling - threaded rod, spherical rod/rear eye, rod/rear clevis. pivot eye or eye bolt, trunnion?
Hydraulic or Pneumatic Actuators
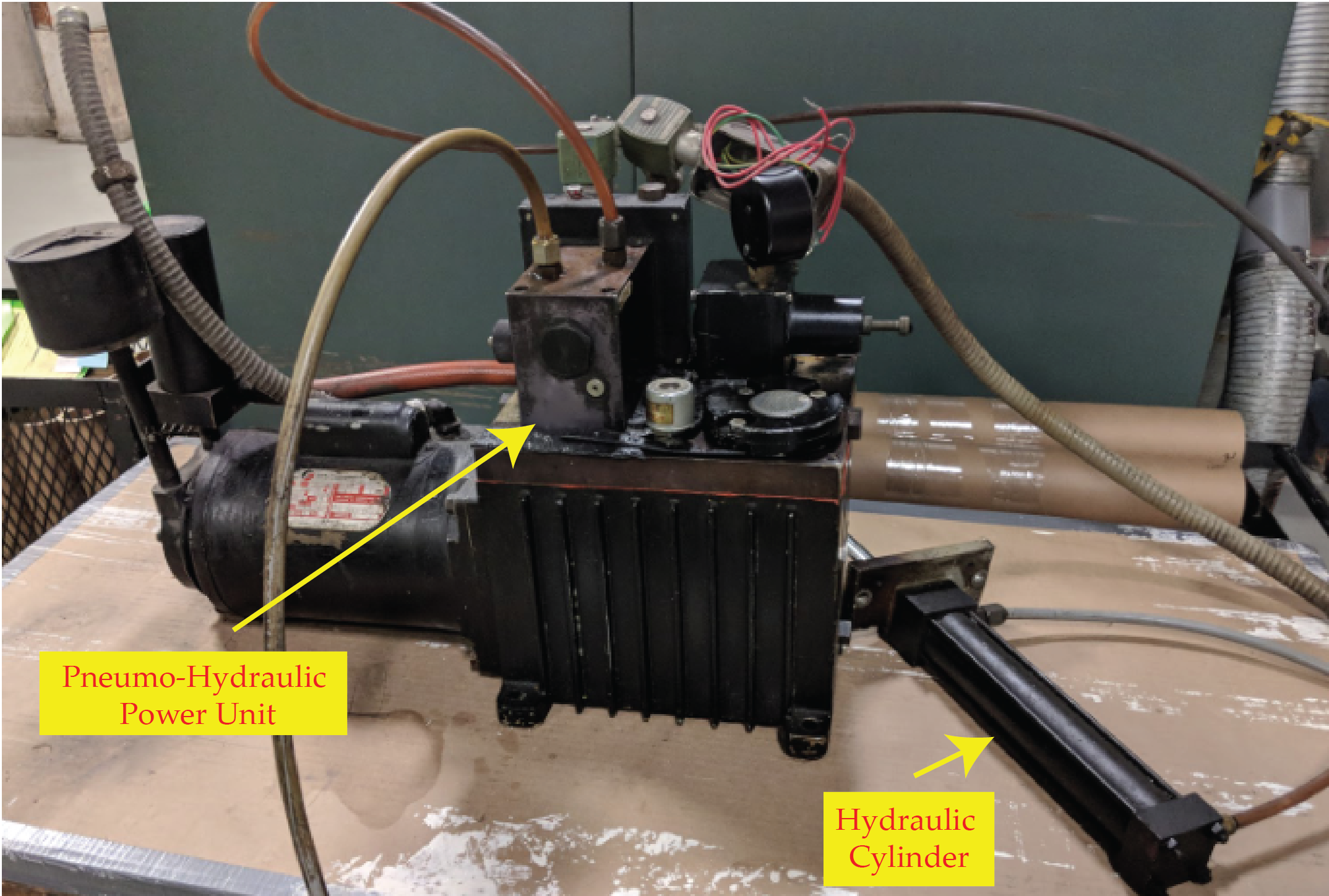
Older actuators are either hydraulic or pneumatic actuators. Hydraulic actuators require a hydraulic power unit to supply the fluid that would move the shaft of the cylinder in or out of the cylinder. These units and actuators were common in the 50's up to about the 90's, mostly because the could provide the hydraulic pressure required to move the cylinder or actuator to displace heavy loads.
During that time the technology of electromechanical actuators was not advanced enough to provide a reliable actuator to move heavy loads. Pneumatic actuators have the advantage that they can be used in locations where hazardous environmental conditions do not allow the use of any type of electrical equipment or heat producing devices.
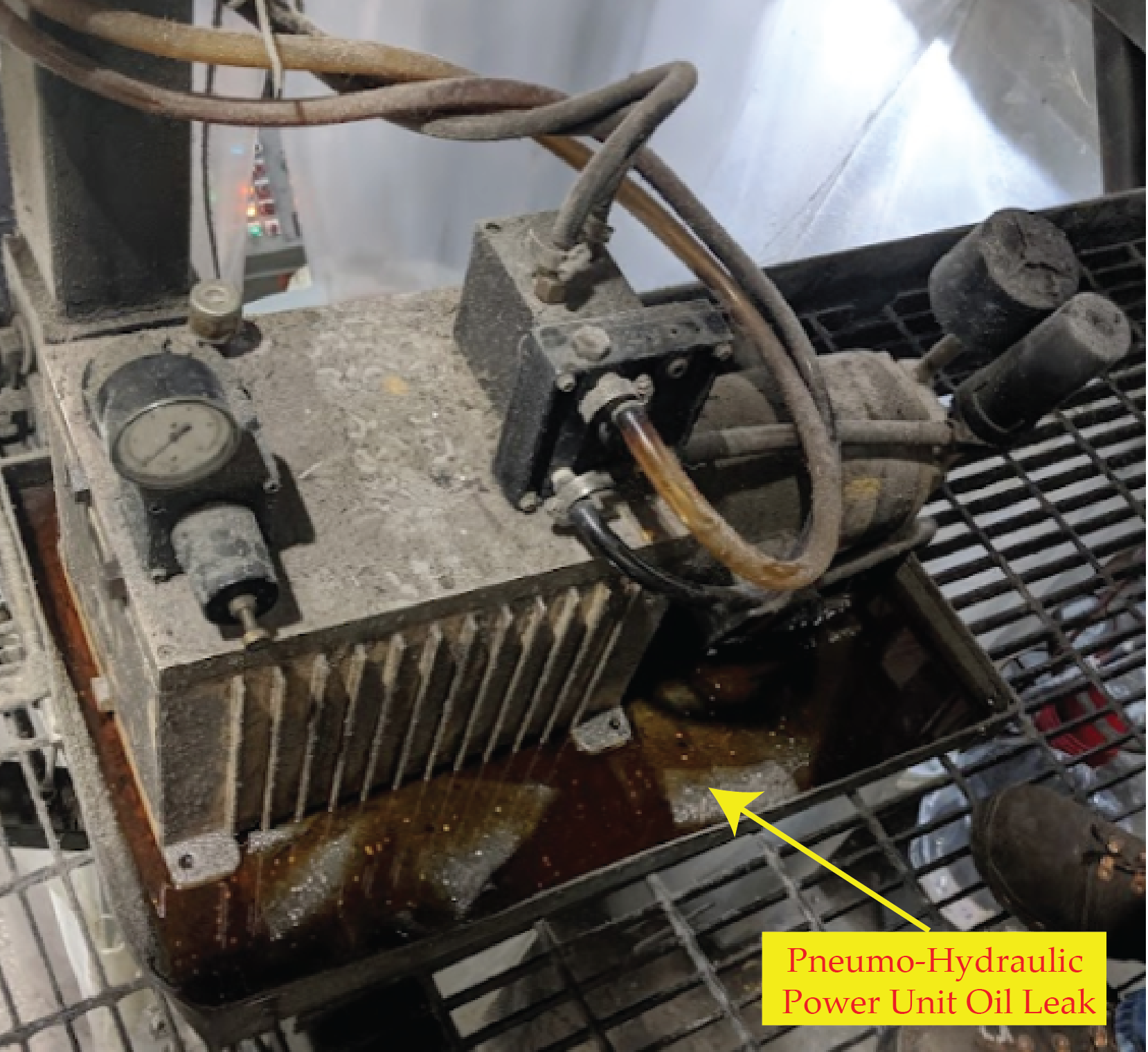
However, these two types of actuators do have certain issues in industrial operations. Hydraulic actuators still had issues with precision and presented the risk of contamination from hydraulic fluid leaks. Additionally, these units have a higher maintenance cost of both the cylinder and the power unit, and are extremely noisy.
Pneumatic actuators require large cylinders to have the same thrust and power as hydraulic or electromechanical actuators, and can have issues with precision with temperature changes and high loads, as air is a compressible gas.
Electromechanical Actuators
The introduction of electromechanical actuators in the 90's solved many issues in the converting industry. The improved designs today present greater precision and lower maintenance cost. Most important, they are capable of moving very high loads with precision and efficiency.
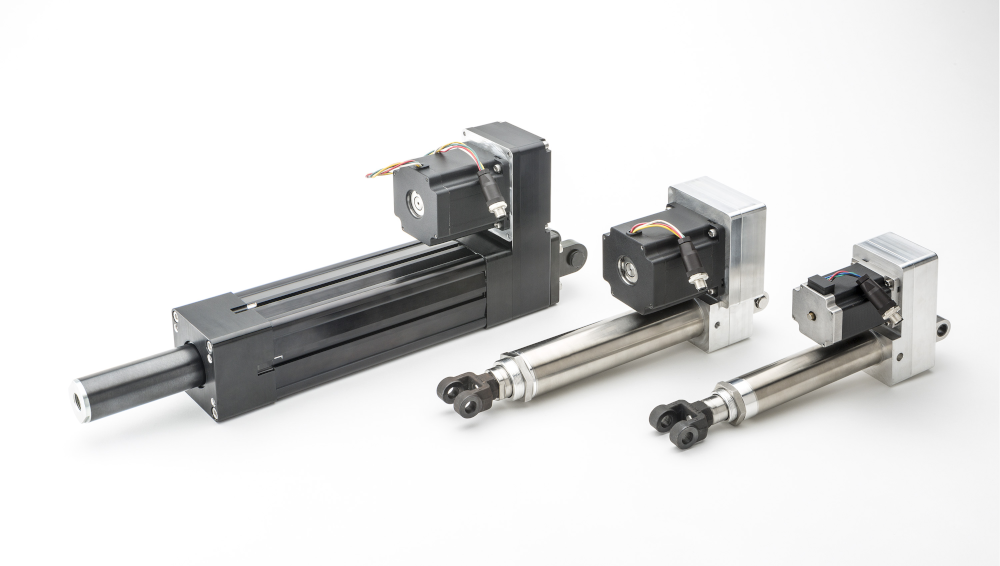
Most web guides today use electromechanical actuators. Typical electromechanical actuators will have a motor that drive a gear belt using a pulley. Another pulley is connected to a lead screw, ball screw or roller screw where the rotary motion is converted into linear motion at the rod end of the actuator.
Terminology in electromechanical actuators
Electromechanical actuators have another list of terms that allow for proper selection:
- Current, voltage and power - what is the maximum?
- Pitch/lead and gear ratio - this information is required when converting rotary motion into linear motion using pulleys and timing belts.
- Backlash and resolution - low end lead screw actuators deal with backlash, and resolution is the smallest movement that an actuator can produce.
- Backdrive - usually deals with web guides that have to work against gravity.
Types of actuators are identified by the following
- Inline and reverse parallel
- Limit switch/End stop
- Motor - Servo, stepper, brushed and brushless
Sizing Web Guide Actuators - Factors
When determining which actuator to use in a web guide design there are certain factors that are required to select an actuator that has the appropriate thrust and stroke required for the application.
- Web line speed - the maximum disturbance frequency that can be processed is dependent on the web speed. The higher the speed web speed the higher dynamic response needed from the actuator. The dynamic response is related to the acceleration and the acceleration is related to the thrust, that's why web speed becomes important
- Guide structure weight + roll weight (for terminal guides) - knowledge of the magnitude of the mass that will be moved is necessary.
- Bearing friction (dependent on type of bearing) - roller or precision linear bearing have low friction, if they are new or in good shape. Sliding surfaces have higher friction
- Break away force - what is the force required to get the guide structure in motion, most important in terminal guides. This is determined by the coefficient of friction of the bearing
- Disturbance magnitude and frequency - this is mostly unknown. There is an amount of disturbance that can propagate through the converting machine and it is dependent on the speed of the web. The faster the web the higher the disturbance frequency, so the web acts like a low pass filter.
- Desired acceleration - this is the desired response time. Note that as lower web speeds are processed the desired acceleration will be less.
- Type of guide structure installation - here we are most concerned on whether gravitational effects need to be considered based on how the web guide structure will be installed.
Actuators are now fairly straight forward in designs and capabilities. As a converter, all you will need to do is answer a few questions from the supplier to determine the best actuator for your operation.
In our next blog post we will talk about sensors for web guiding applications. We hope this information is of use to you and the personnel in your operation. We can help you in determining the best actuator for your web guiding application, along with any other issues you might have with a web guiding solution for your converting process. You can follow us on facebook, linkedin, or youtube to stay informed on applications, products and technical information.
