
Normal Entry Rule for Webs: Essential Principles Explained
Dive into the fundamental 'Normal Entry' rule for webs traveling over rollers in this episode of 'Web Guiding Fundamentals.' Understand how a web always aligns itself perpendicular to the axis of a roller's rotation, even in cases of misalignment. Learn about the beam-like behavior of the web, the dynamics of its movement, and the importance of these principles for successful web guiding applications.
Transcript
Show full transcript (322 words)
[Music] Normal entry is a web approaching a roller will always align itself perpendicular to the axis of rotation of the roller. As you see in this video right here, let me restart that. As soon as the roller on the left has a misalignment, the web started to track and move in such a way that it will approach the roller on the left perpendicular to the axis of the rotation. This is the fundamental principle used in most of the intermediate web guides that we're going to see.
What's happening here is that the web is essentially behaving like a beam and the angular displacement on this left hand side is bending the beam and it's causing the beam to bend and that's what is causing the web to track to this side. There are lots of dynamics involved in this process. how fast the web moves, how much does it move, all of those depends upon the transport conditions, the what type of web it is, what kind of traction you have and things like that. And obviously the static behavior is that um at steady state once this angle is set, how much is it going to move?
Are we going to see any movement on this side? As you can notice when this web moved the upstream roller, the web was still there. It was maintaining there because it was able to have enough traction so that the lateral forces or the moment that is acting there was not able to make the web move. And whenever we have a motion like this, bending occurs, bending in term means that there are stresses developed in the web.
So you're going to have a tight side and a slack side and they're going to be a tension profile here. So these are important to understand for a successful webg guiding application or execution of a web guide. [Music]
Understanding the Key Components of a Basic Web Guide System
In this episode, we delve into the essential elements of a basic web guide system. We explore the four main components: the guide structure or mechanism, the actuator, the sensor, and the controller. Learn how each component plays a crucial role in ensuring precise web positioning, from making physical contact with the web to providing feedback and executing corrective actions in a closed-loop feedback control system.
Transcript
Show full transcript (296 words)
In terms of a basic web guiding system, we are mainly dealing with four main items apart from the web. One is the guide structure or mechanism. This is the device that is actually making contact with the web and that's the one that is need to be moved or it moves the web. There are different types of guide structures that we will go through.
The other component of a web guiding system is an actuator. So actuator is something that takes an electrical signal and converts that into physical motion so that it moves the guide structure so that the web can be located at the desired location. The third and one of the most important components of a web guiding system is a sensor. The sensor is the device that provides the feedback.
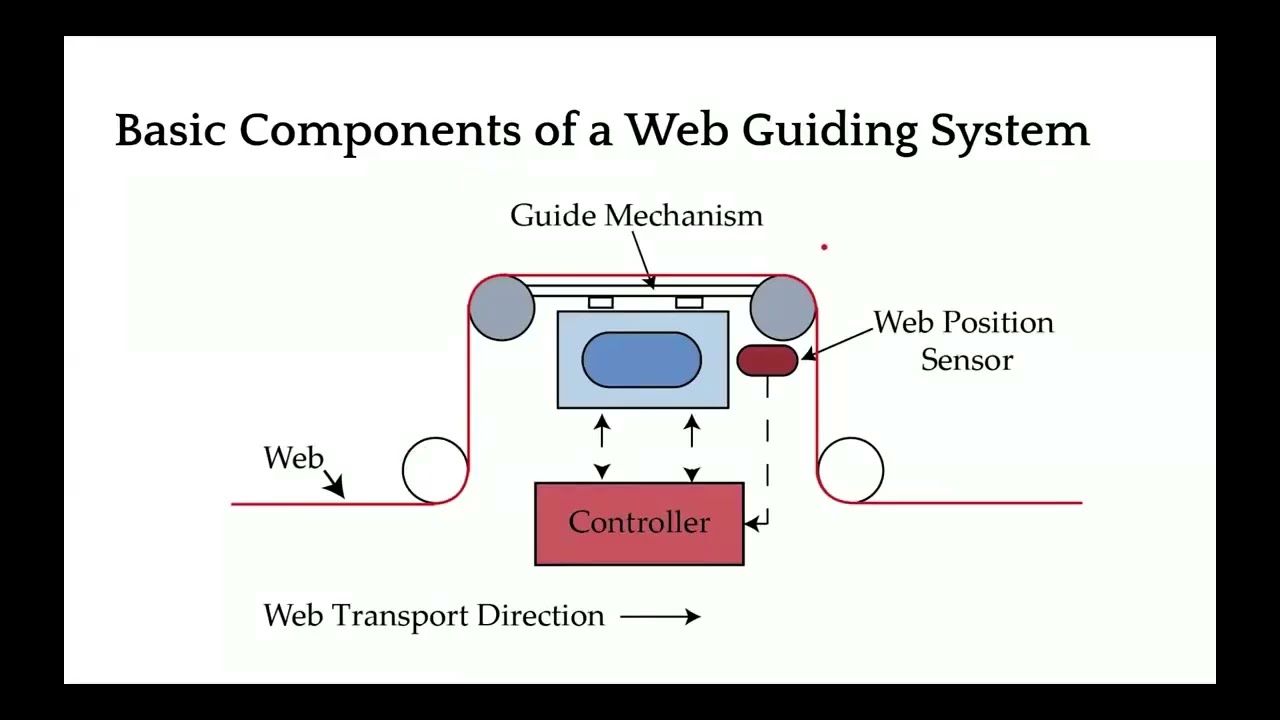
The sensor is the one that tells us where the web is inferring the position and then that signal is sent to a controller. The controller is mainly the intelligence or the brains that takes that sensor signal and computes the corrective action required. So the actuator can move the guide mechanism to the the location where we can get the desired web position. Again, another schematic of how the components of the web guides are.
Web is a part of the web guiding system. And then you have the mechanism. There's an actuator inside the mechanism. The sensor gets the position feedback of where the web is, sends that information to the controller.
controller then computes an error and it sends the command to the actuator so that the mechanism can be moved to position the web at the right location. This is a closed loop feedback control system that is a main part of a web guiding system.