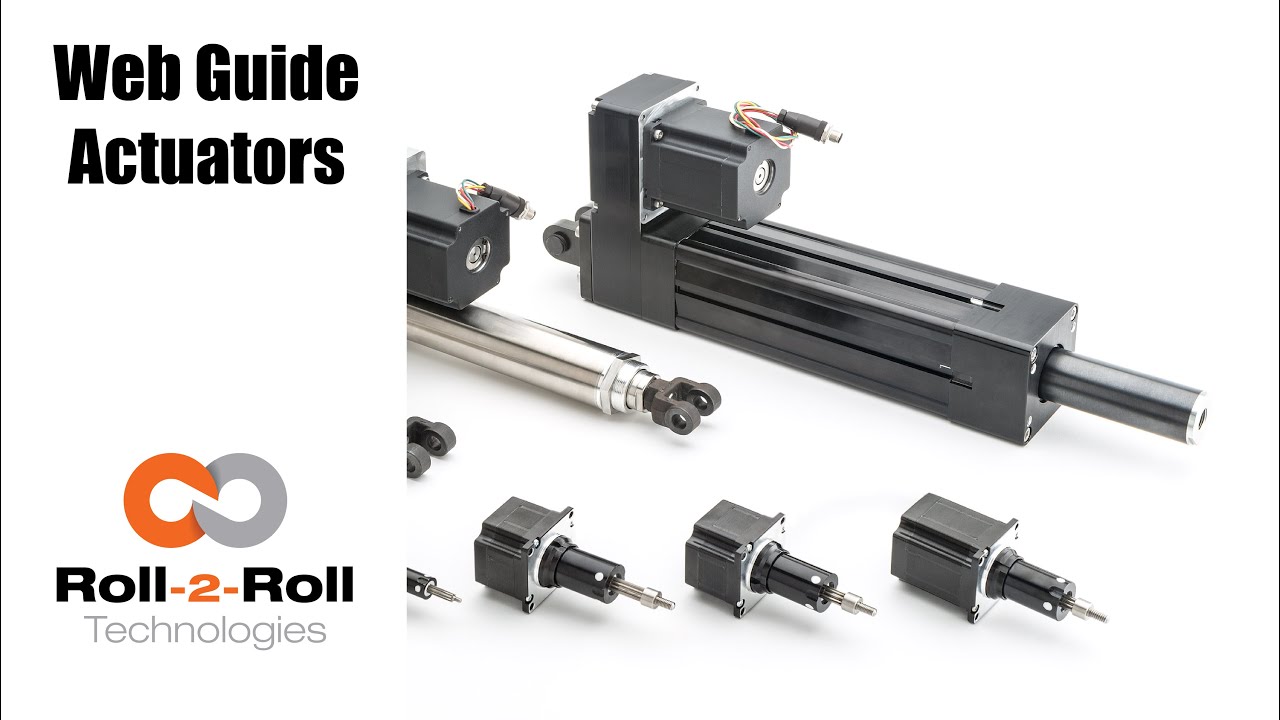
hi this is petrol in law school with roll-to-roll technologies most people think of us as a narrow web company but we actually go into the white web applications - and to show you that we want to present to you our wide range of actuators available for both narrow web applications and white web applications in this front row I have for our narrow web applications these are the actuators that we use in our smaller web guys they go up to about for up to 22 inches in width and so they can handle web's up to 20 inches in this case this a small actuator is what we use it can handle up to 50 pounds of thrust so 450 pound tension applications and it's what we use in our low profile web guides then we have our our larger actuators which we use for applications such as our compact web guide and these can also go up to 50 up to about 150 pounds of tension and then we have the double stack actuator which we use in bigger applications and these can go up to 200 pounds force so they're all available for you for narrow web applications also we have an application for our retrofit kits in this case I have one of our featured actuators which you can see it also has mounted the several Center on it now this is a very robust application it can be provided with you with eyebolt terminals on either side or we can easily with clevis doing so if you have a web guide in your in your plant that requires you know the mechanical parts are all good the controls are update outdated you can actually we can provide you with an actuator and our controls and sensors to it so this is more or less the setup that we will probably we can mount it either through the eye bolts we can mount it through clevis or we can mount it directly on a any fitting that you might have on your machine these are very easy to install and they come already with the several Center mounted on them so it's all up to the particular application that you have in a problem that you want to solve another area that we want to talk to you about is on our terminal web guides like I mentioned before people think of us as a narrow web company but we're not we actually cater up to also the the wide web applications and also we cater to the terminal guy diplucate so in this case we have featured some of our what we call the actuators for terminal guides for online xandrie once we have multiple ways of installing these on your machines depending on your needs we can do either clevis mountings or we can install it directly on the base of the actuator now we can provide you one that would work that would move a 1500 pound load a 5,000 pound load or up to 15,000 pound load so it's a very hefty product as you can see it's a very heavy and we use it to like I mentioned before to move unwinds and rewind so I have it hooked up to our one of our control units with one of our infrared sensors and just to show you how easy it is it can work pretty well with our with our controls right here right and if I put it on automatic as I use my hand as a material you see how it just and we can adjust the speed of this application depending on your needs so we hope this has been of information of use to you and like I mentioned before if you need any help with retrofitting an old web guide you can contact us more information you can go to our website ww2 and thank you for a time you