In this episode, we'll explore the functionalities of the SCU6x controller, focusing on the different operations of jog buttons, and the servo center feature. We'll explain how the servo center button positions the web guide in neutral and how this differs from the momentary jog buttons. The video also covers indicator states for the servo center operation, including how it transitions from green to red. Future videos will detail more about the methods for servo centering, including using electronic limits and physical proximity sensors.
00:00 Introduction to Web Guide Servo Center
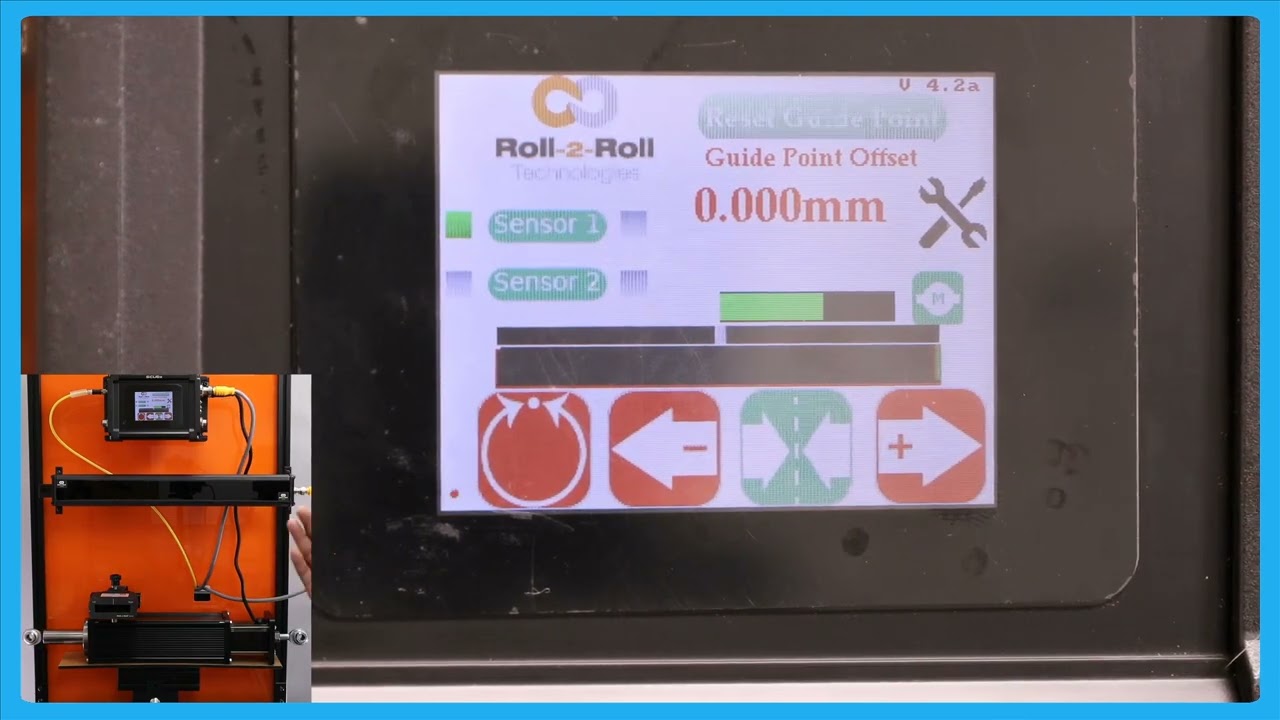
00:35 Understanding Jog Buttons vs Servo Center Buttons
00:55 Operation and Indicators of Servo Center
01:41 Conclusion and Future Topics
Transcript
Show full transcript (341 words)
now if you want to put the web guide in Servo Center basically means different things for different types of web gues but essentially putting the web guide in a newos so that it has enough stroke to go on either side um of the servo Center position then you can press this button and this button uh it's a single press button and when you press that it will bring the web guide or the actuator to its home position or what we call as the zero position so one difference between the jog buttons and the servo Center buttons or that these jot buttons or what we call as momentary buttons that means that you need to keep pressing there for the actuator to keep jogging as soon as you let go the actuator is going to stop jogging in that case both of them are like that um Ciro Center is more like a push button and it it will actually tell you the Stak in which it is there for example if I johned it and then if I put it to server Center this is in the servo Centric state so it's going to be green and until the servo center operation is done it will stay green and once the operate operation is done it will turn back to Red so there's no need for us to keep pressing that button it's a one time push button C so click just to give you this again when you press the servo Center it's going to uh bring the actuator to its home position once the operation is done once it reaches the home position it's will turn back to um reding there are different ways in which we could do the servo centering operation which will be handled in a future video essentially depending upon whether we are just using an electronic limit or if we're using a physical proximity sensor to do that so those are for the jog left Jog and turbo Center